
私は何度か単軸ロボットの過負荷トラブルを経験したことがあります。
特に思い出される事と言えば、ボルトが長すぎて単軸ロボットの内部に飛び出したボルトがスライドユニットに干渉して過負荷になってしまうトラブルです。普通なら、組立作業中に気が付きそうな失敗なのですが、ブレーキ付きの単軸ロボットであったため組立後に手で押してスライドさせて確認することができず、そしてカバーを外してボルトの飛び出しがあるのか?確認を怠ったために起きてしまいました。
今後、このような失敗が起きないように、単軸ロボットの取付け注意点と過負荷の原因をまとめておこうと思います。
単軸ロボットの取付け注意点と過負荷の原因
単軸ロボットを簡単に説明
単軸ロボット(ロボシリンダ)の本体は「サーボモータ」と「ボールねじまたはベルト」と「スライダ(スライドユニット)」によって構成されており、動きの特徴は「1軸直線運動」で「位置決め(任意の停止位置を設定)」ができることです。省スペースで高速で任意の位置に繰り返し動作させたいときに最適です。
出典:IAI 総合カタログ 単軸ロボットの特徴

出典:YAMAHA ROBOTカタログ

取付け注意点
単軸ロボット(ロボシリンダ)を部品に取付ける作業の注意ポイントをまとめておきます。
単軸ロボットの取付け作業の注意点
- 取付面の平面度が確保されている事
- 取付け部品に単軸ロボットの位置決めがあること
-
取付ボルトが内部に飛び出さない長さを選定すること
まず1点目の「取付面の平面度が確保されている事」についてですが、単軸ロボットを取付ける部品の取付面は「切削加工」または「みがきFB(反りないこと)」のように平面度(IAIの場合0.05mm/m)が良い状態でなければなりません。もし取付面が歪んでいると単軸ロボット本体が歪み、内部のスライドユニットに芯ずれが発生して過負荷で動作しない、または早期に故障する可能性があります。
2点目の「取付け部品に単軸ロボットの位置決めがあること」ですが、スライドタイプは「本体背面のピン穴」と「背面横面の加工面」が部品との位置決めに使用できます。ロッドタイプをフランジ取付けする場合は、本体のロッド側の凸を「インロー固定」として位置決めに使用できます。一時的な取外しや交換の際に、再現性がある取付け方法とすることでポジションの再設定やスライダ、ロッドの芯出し作業が不要になるメリットがあります。
出典:IAI 技術資料
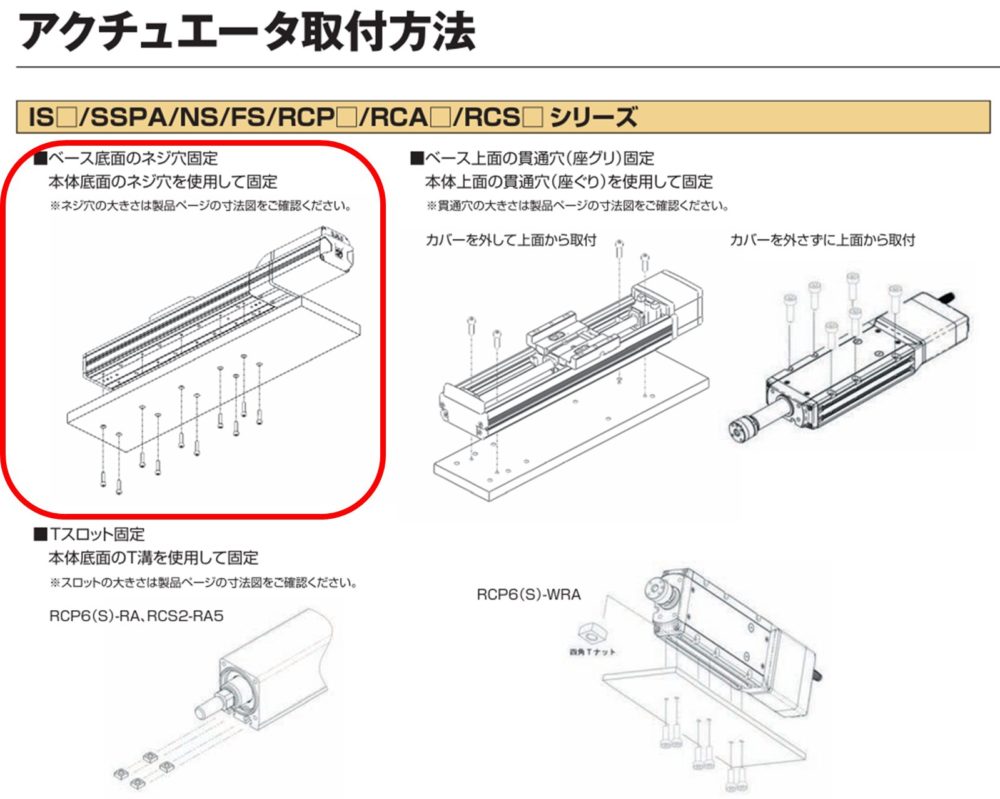
そして最後に、、3点目の「取付ボルトが内部に飛び出さない長さを選定すること」ですが、ベース底面のねじ穴固定取付けの場合(裏側からの取付け)は、ボルトが内部に飛び出してスライダと干渉し動作不能となることがあるので、ボルトの長さには十分に注意が必要です。IAIの取扱説明書によると「ボルトの長さはタップ穴がアルミ材の場合は、呼び径の1.8倍の長さ」となっていますが、一般的なボルトの長さは5mm単位なので丁度よい長さがない場合があります。そのような場合、長めのボルトを選択しがちですがボルトが内部に飛び出してしまうリスクがあります。そのため、ボルトを締めたら単軸ロボットのカバーを外して内部にボルトが飛び出していないか?確認したほうが良いでしょう。そもそもですが、設計段階でボルト長さに留意して部品の板厚を決める、座グリの深さを決める、ことも大切です。
過負荷の原因
単軸ロボット(ロボシリンダ)に初めて電源を投入し、動作確認していると過負荷によるトラブルが発生することがあります。
過負荷が発生するメカ的要因
- 可搬重量オーバー
-
取付ボルトがスライダに干渉
-
メーカーのロッドの芯出し不良
-
部品に取付けたことによってボディが歪んでいる
- 単軸ロボットと可動ユニットに芯ずれが発生している
「可搬重量オーバー」は、そもそも可動させたいユニットの重量が大きいことが原因であったり、移動速度を速くすることで加減速領域で発生することもあります。これは設計で再検討する必要があります。
「取付ボルトがスライダに干渉」と「部品に取付けたことによってボディが歪んでいる」に関しては、前述の「単軸ロボットの取付け注意点」に起因することなので渇愛します。
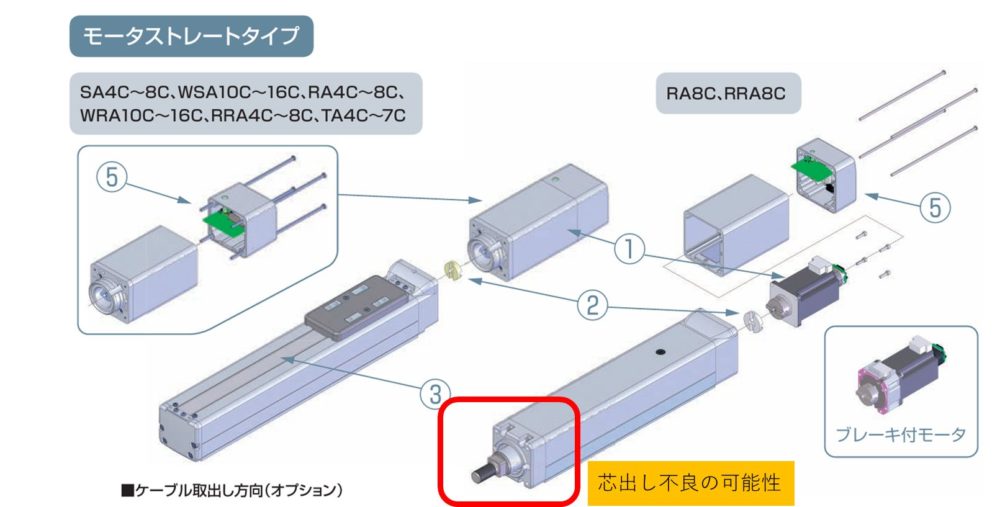
次に、「メーカーのロッドの芯出し不良」に関してですが、これはロッドタイプの単軸ロボットに限定する事象です。スライドユニットとロッド軸受けの芯出しがメーカー組立時に不十分で、スライダが軸受け側に移動し近づくほどに負荷が大きくなり過負荷になることがあります。対処としては軸受け部分のボルトを緩めて、スライダユニットを軸受け側の端まで移動させた状態でボルト均等締めけすることです。改善しない場合はメーカーで対処してもらうしかありません。
出典:出典:IAI 技術資料
最後に「単軸ロボットと可動ユニットに芯ずれが発生している」ですが、組立時に芯だし作業を行ったとしても、構造の問題、部品精度の問題、組付け誤差の問題、作業者スキルの問題、などによって大なり小なり芯ずれは発生します。そのため、単軸ロボットと可動ユニットの接続部分は、X方向、Y方向、Z方向の偏心吸収ができるフローティング構造にしておきましょう。
ポイントまとめ
それでは、単軸ロボットの取付け注意点と過負荷の原因について重要なポイントをまとめておきます。
ポイント
- ボルトが長いとスライドユニットと干渉するので過負荷になる
- メーカーのロッドの芯出し不良で過負荷になることがある
以上2つのポイントです。
参考

*単軸ロボットの購入はこちらから
関連記事:【搬送要素】
以上です。