
今回は「エンコーダは位置制御に不可欠」についての記事です。
位置制御や位置決めには欠かせない機器として、エンコーダーがあります。
私の経験上、エンコーダーに関わるトラブルは意外と多く、知識がないために解決ができないこともあります。
そこで、今回はエンコーダーについて、種類と特徴をまとめておこうと思います。
エンコーダとは
エンコーダとは、回転時の「速度」「位置」「回転方向」を高い分解能で検出する機器です。
エンコーダーはモーター(電動機)などの、回転運動と組み合わせて使用されます。代表的な製品には「サーボモーターがあります。」
参考
*サーボモーターについてはこちらの記事をご覧ください。
-

-
サーボモーターの特徴と種類まとめ【高度な位置制御が可能】
今回は「サーボモーターの特徴と種類」についての記事です。 サーボモーターと言えば、高精度な制御が可能で機械 ...
続きを見る

引用抜粋:オムロン インクリメンタル形 E6F-C

位置制御の仕組み
エンコーダは「速度」「位置」「回転方向」の検出のために、エンコーダ内部に「スリット付きの円盤」と「発光素子」と「受光素子」が内蔵されています。
検出の仕組み
-
回転するスリット円盤を、発光素子と受光素子で検出する
検出方式の種類
検出方式には「インクリメンタル形」と「アブソリュート形」の2種類の方式があり、制御方法や特徴に違いがあります。
*インクリメンタル形はインクリメントとも呼ばれます
引用抜粋:多摩川精機 ロータリーエンコーダ
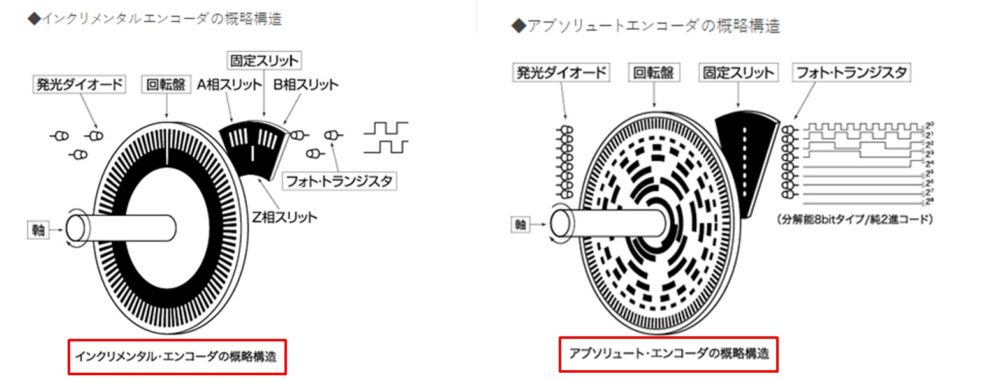
円盤のスリットに大きな違いがあります。
-
インクリメンタル形・・・円盤が回転しているときに、回転した角度に応じたパルス信号を出力し角度を検出
-
アブソリュート形・・・円盤のスリットが複雑なので、スリットパターンによって角度を検出することができる
インクリメンタル形とアブソリュート形の特徴
それでは、インクリメンタル形とアブソリュート形の特徴について、詳しくまとめておきます。
| インクリメンタル | アブソリュート | |
| 検出タイプ | 相対位置検出タイプ | 絶対位置検出タイプ |
| 原点復帰 | 電源OFF(非常停止含む)をしたら、原点復帰動作が必要 | 電源OFFしても、位置を記憶しているので、原点復帰不要 |
| バッテリ | バッテリ不要 | 必要タイプと不必要タイプがある。(バッテリで位置情報を管理している) |
| 原位置(基準位置) | Z相を原位置の基準とする(1回転で1回、Z相のスリットがある) | 任意の位置を原位置として登録できる |
| 検出方法 | 回転時のスリットをパルスで検出。回転していないと検出できない | 回転していても、していなくても、複雑なスリットパターンのため検出可能 |
| 回転方向の検出 | A相とB相のどちらを検出するか?によって回転方向を検出 | スリットパターンによって回転方向を検出(検出が速い) |
| 価格 | アブソリュートより安い | 高価(近年は価格差は少ない) |
補足 インクリメンタル形
インクリメンタル形は、電源OFFで毎回原点復帰が必要ですが、トラブル後の復旧で原位置(基準位置)のズレを気にする必要がない、とも考えられます。
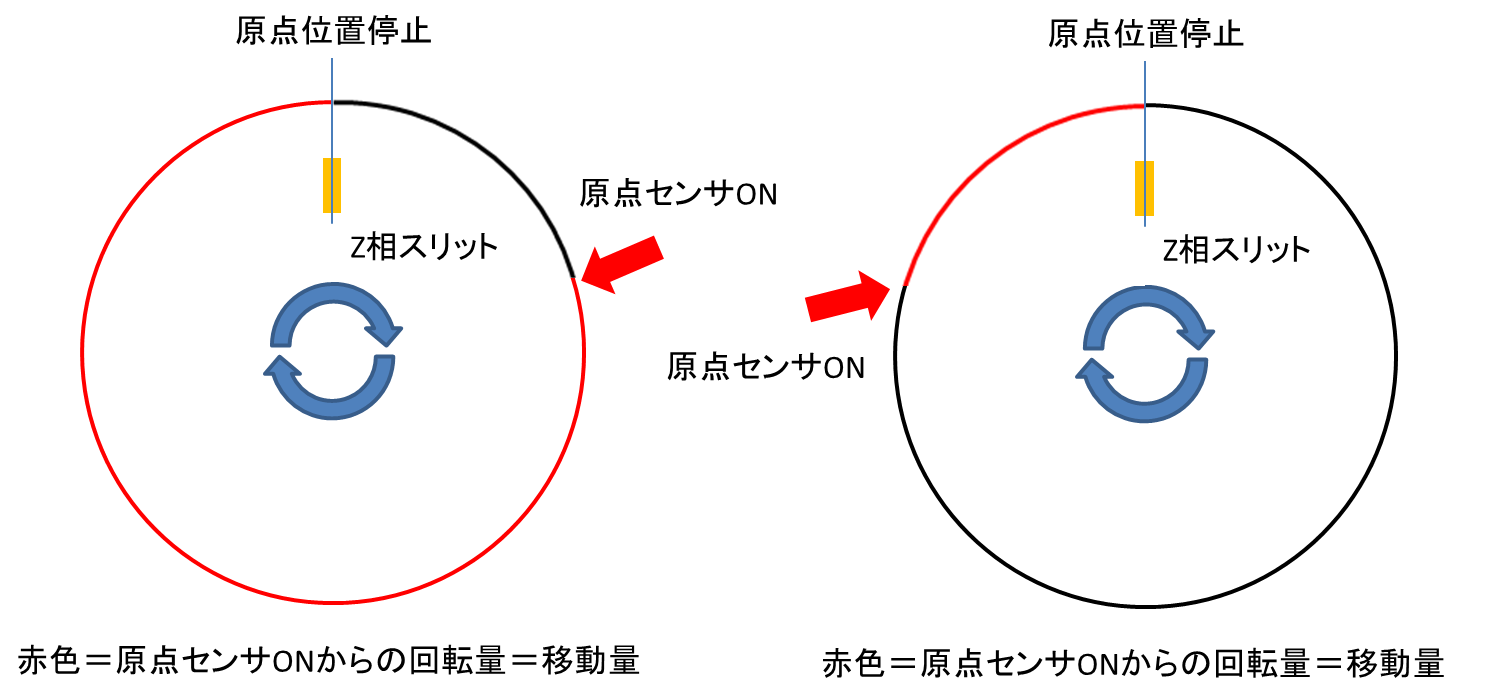
しかし、Z相の位置は1回転で1回しかないので、例えば、原点センサやボールねじのカップリングなどのズレがZ相付近で起きると、Z相の検出(原位置)が1回転分ズレることがあります。
その逆に、1回転の範囲内でのズレであれば、原点センサがONしてからの回転量(移動量)に違いはありますが、原点停止位置は同じ(変化なし)となります。
原点センサONのイメージ図
補足 アブソリュート形
アブソリュート形の最大のメリットは、原点復帰をしなくとも位置情報を検出ことが可能であることです。
ただし、バッテリー必要タイプはバッテリーの劣化やエンコーダーのケーブルを切り離した場合には、位置情報が消失してしまうため、原点復帰や基準位置の再登録が必要になります。
バッテリー不要タイプは、各メーカーによって独自の技術で製品化されています。私は、バッテリー不要タイプのエンコーダーをメンテナンスしたことはないのですが、位置情報が消失しないとのことなので、正確に復旧できれば、原位置や基準位置の再登録は不要でしょう。
まとめ
今回は、位置制御のために使用されるエンコーダーについてまとめてみました。組立やメンテンナンスをする作業者(メカ側)にも必要な情報だと思います。私の経験では、エンコーダーがらみのトラブルは多く発生するので、インクリメンタル形とアブソリュート形の特徴を把握したうえで対応しましょう。参考にしてください。
*機械制御の参考にいかがでしょうか
関連記事:【センサ/電子機器 】
以上です。