
今回は「OTセンサとメカストッパーの考え方」についての記事です。
機械装置がクラッシュせずに安全に使用するために欠かせないモノに「OTセンサ」と「メカストッパ」があります。OTセンサとメカストッパーは「もしも」のために必ず必要となるので「制御」や「安全」の基本と言えます。
そこで今回の記事では、OTセンサとメカストッパーの考え方と取付け事例を紹介しようと思います。
記事の目次
OTセンサとメカストッパーの考え方
自動化された機械装置の危険性
機械装置を制御(PLC)によって自動化すると、安定した品質を大量に作ることができるメリットがありますが、その反面注意しなければいけないことがあります。
自動化の機械装置の注意点はコレ
-
もし「定常外の動き=予想外の動き」となったらどうすればよか?
制御と言いますと、一般的にはPLCを使用してプログラム通りに機械装置が動作するようにされていて、「定常外の動き=予想外の動き」が起きることはありません。
ところが、そうは言って低確率ではありますが、「定常外の動き=予想外の動き」が起きることがあります。
「定常外の動き=予想外の動き」が起きる状況はコレ
-
手動操作を間違えた
-
制御(プログラム)のバグ
-
センサが破損や誤作動した
-
メカ調整や制御のポジション設定を間違えた
そしてこのような状況が発生すると、とんでもないことが起きます。
-
「クラッシュ」と呼ばれる「可動部の事故」が発生する

制御された機械装置は制御によって成り立っているので、制御が誤った判断で機械装置を動作させると「クラッシュ」が発生してしまいます。
クラッシュが起きるとどうなるのか?
-
部品が壊れる
- 作業者がケガをする
-
ポジションや座標がズレる
-
機内のメカ部品の位置関係がズレる
1度クラッシュが発生すれば機械装置を運転させられる状態(正しい状態)ではなくなってしまうのです。
このような事態は、いくら機械装置のメカと電気の完成度を高くしても、インターロック(安全機構、安全回路)を厳しく設定しても、発生する確率を低くすることができるだけで「絶対起きない」とは言い切ることができません。
そこでポイントとなることがコレなんです。
-
緊急停止させる
もし「定常外の動き=予想外の動き」が発生したら、クラッシュしないように機械装置を緊急停止させるのです。
これは自動化された機械装置には絶対に必要な機能であり、これによって「機械装置」と「作業者」の安全を守ることができます。
OTセンサとメカストッパーの考え方
自動化された機械装置を緊急停止させるために必要な要素は3つあります。
-
機械装置の状態の検出・・・OTセンサ
-
停止させる制御・・・PLCのプログラム
-
停止させる機構・・・動きを止めるストッパー
そして、緊急停止に必要な3つの要素を組合わせてたシステムはこうなります。
-
OTセンサが検出したら制御で停止させる
-
制御が機能しなくなった場合は、メカストッパーに当てて停止させる
メモ OTセンサとメカストッパー
OTセンサとは、オーバートラベルの略で可動範囲を超えて動いてしまったときに、その状態を検出するセンサのことです。OTセンサとして使用するセンサの出力はB接点とするのが基本で「検出したら電気信号をOFF」や「センサが破損したら電気信号OFF」となるタイプです。
メカストッパーとは、可動部が設定値以上に動かないように可動範囲を制限するメカ的停止装置です。可動しているエネルギーを急停止させるので、もの凄く大きな力が発生します。そのため、ストッパーが破損しないように「高強度」とする場合と、あえて「低強度」にしてストッパーが破損することでエネルギーを吸収する場合があります。
少数派ではありますが「緊急停止はメカストッパーで止めれば良い」との考えの人を見かけますが、制御された機械装置においてはこの考えは間違っていると思います。
つまり、この考えが大切です。
-
制御されたモノは制御によって停止すべき
- 制御で停止できるのに、わざわざメカストッパーで負荷を与えて停止させる必要はない
制御の基本は言うまでもないですが、機械装置に不必要な負荷を与える必要もありません。当然、緊急停止を機械的にすればメカストッパーには大きな力が加わることになります。もし繰り返しメカストッパーに衝突するようなことがあれば、部品や機器にダメージが蓄積され何かしらの問題が発生することも予想されます。
もちろん、メカストッパーに衝突したからと言って問題が起きるような設計(構造)にはなっていないはずなのですが、メカストッパーによる緊急停止は想定を超える力が働くことが結構ありますので注意が必要です。
メカストッパーで緊急停止させる考え方
機械装置を緊急停止させる場合は、OTセンサの検出によって制御で停止させるべきですが、もし制御不能な状態となったらメカストッパーで緊急停止させなければいけません。
ここで重要なことは、可動物体のエネルギーをどうやって吸収、停止させるのか?と言うことで、この考え方は2通りあります。
メカストッパーの考え方は2つです。
-
絶対に破損しない強固なメカストッパーにする
-
衝突したらメカストッパーが変形(破損)してエネルギーを吸収する

絶対に破損しない強固なメカストッパーにする場合は、衝突のエネルギーを吸収しないので大きな衝撃がおきます。そのため、部品が破損しない代わりに、タイミングベルトや歯車の歯飛びやパワーロックのスリップなどの位置ずれが発生することがあります。また、繰り返しメカストッパーに衝突すると部品やフレームにクラックが発生することも考えられます。
メカストッパーが変形(破損)してエネルギーを吸収する場合は、衝突のエネルギーを部品が壊れることで吸収するので衝撃は小さい傾向です。一度衝突するとメカストッパーの交換が必要になりますが、歯飛びやスリップが発生しにくく、メカストッパー以外の部品に与えるダメージは小さくなります。
このようなメカストッパーの考え方は、「どちらが良いのか?」とは一概には言えず、「どのような機械装置なのか?」によって使い分けると良いです。
OTセンサとメカストッパーの取付事例
OTセンサとメカストッパーの取付事例を紹介しますとこのようになります。
OTセンサとメカストッパーの取付事例
*クリック拡大
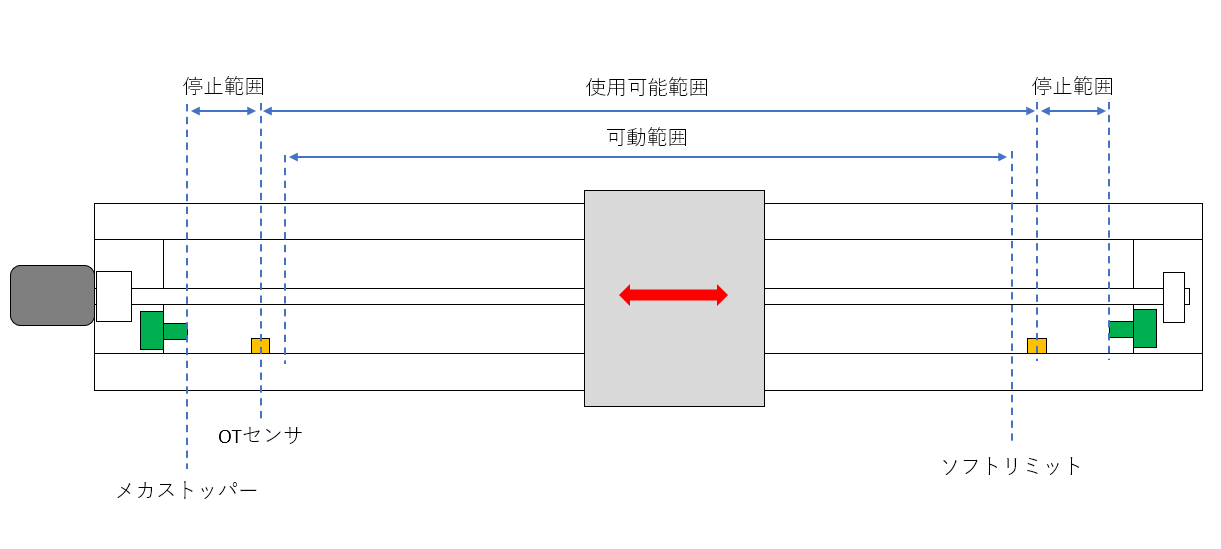
可動の両端にメカストッパーがあり、その手前にOTセンサとなりOTセンサとメカストッパーまでの範囲が停止範囲です。通常はOTセンサが検出したらメカストッパに当たらずに停止範囲で緊急停止しますが、何らかの理由でOTセンサが検出しなかったり、制御不能に陥った場合にはメカストッパーで緊急停止させます。
その他、ソフトリミットと呼ばれる「可動範囲の制限」をPLC(制御)の設定でおこなうことができる場合もあります。ソフトリミットを設定しておくことで、2重3重のクラッシュ防止対策となるのでお勧めなのですが、一つ厄介なことは座標の変更や手動動作が必要なときにソフトリミットが効いてしまい範囲外に可動できなくなってしまうことです。ソフトリミットの設定はTP(タッチパネル)ではできなかったり、作業者が見た目でソフトリミットの存在に気が付かないので現場では混乱してしまうことがあります。
OTセンサとメカストッパーのポイントまとめ
それでは、OTセンサとメカストッパーについて重要なポイントをまとめておきます。
ポイント
- 自動化された機械装置が「定常外の動き=予想外の動き」となったら緊急停止させる
- 緊急停止は「OTセンサが検出したら制御で停止させる」こと
- もし制御が機能しなくなった場合は、「メカストッパーに当てて停止させる」こと
- ソフトリミットによって可動範囲を制限することも有効だが、設定するかどうかは状況による
以上4つのポイントです。
*機械設計メモさんの記事も参考になります。 ⇒ 「メカストッパーとオーバーランセンサの関係」
*失敗から学ぶことは沢山あります。失敗の科学は考え方を学ぶためにはおすすめです。
関連記事:【センサ/電子機器 】
以上です。